




Beetle brains invaded for tech ideas
 Print
Print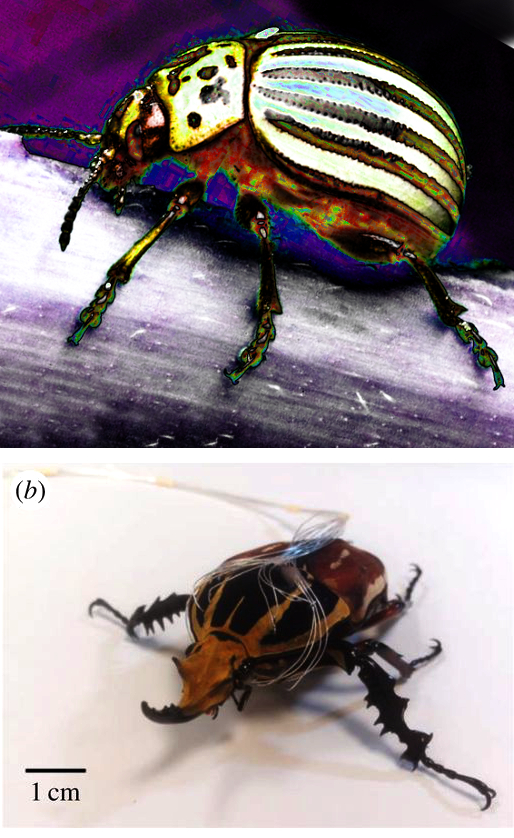 Engineers have taken over the mind of beetle and made it move to their will.
Engineers have taken over the mind of beetle and made it move to their will.
A team from the Nanyang Technologicial University has demonstrated an insect–computer hybrid robot, referred to as a ‘cyborg insect’ or ‘biobot”.
Its leg muscles were electrically stimulated using implanted electrodes to perform a number of walking sequences.
In a world first, the researchers show that their system can control the beetle’s step frequency and walking speed.
Beetles and other small animals have some amazing way to move themselves, which allow them to pass through all sorts of complex terrains.
In order to crack the mechanical secrets of creepy-crawlies, the research team implanted electrodes at key neuromuscular sites to make the insect–computer hybrid robot.
There are a number of advantages to this technique, including the fact that its tiny parts, sensors and actuators do not need to be manufactured. The only necessary ‘assembly’ or ‘operation’ to create an insect–computer hybrid robot is to mount a miniature radio device and implant thin wire electrodes for electrical stimulation to induce the desired motor actions and behaviours.
The second advantage is the low power consumption rate of insect-robot hybrids, in fact, “owing to advanced biofuel cell technology, the insect–computer hybrid robot may be self-powered by energy harvesters embedded in the living insect platform,” the study papers state.
To understand the sequence of leg motions in an insect's voluntary walking gait, the detailed leg motions were tracked by a three-dimensional motion-capturing system and analysed to obtain the time sequence of each motion. Then, custom-programmed sequences for leg muscle stimulation to generate different walking gaits and to operate the sequences using a microcontroller were developed.
They demonstrated that beetles can be controlled to walk in tripod and galloping gaits, and by altering the step frequency, the step length and walking speed of the beetles can be adjusted.
“Compared with existing insect–computer hybrid robots in which the control of walking speed and gait is impossible, the ability to monitor the robot's walking speed and walking gait would enable it to complete more complicated tasks,” the study says.
“Such regulation of the beetle's leg motions at predefined sequences and durations should significantly contribute to the future development of animal–computer hybrid robots.
“For instance, we could control the middle and hind legs of the beetle or regulate the appendage motions of other animals such as cockroaches and dragonflies for legged robots and unmanned aerial micro-vehicles.
“Furthermore, the stimulation protocol demonstrated can benefit biological research in the field such as testing the physical limit of muscles, comparing the energy efficiency of different walking gaits and confirming the hypothetical functions of muscles.”
The full study is available here.
The following video shows the robo-beetle in action.
brcenter